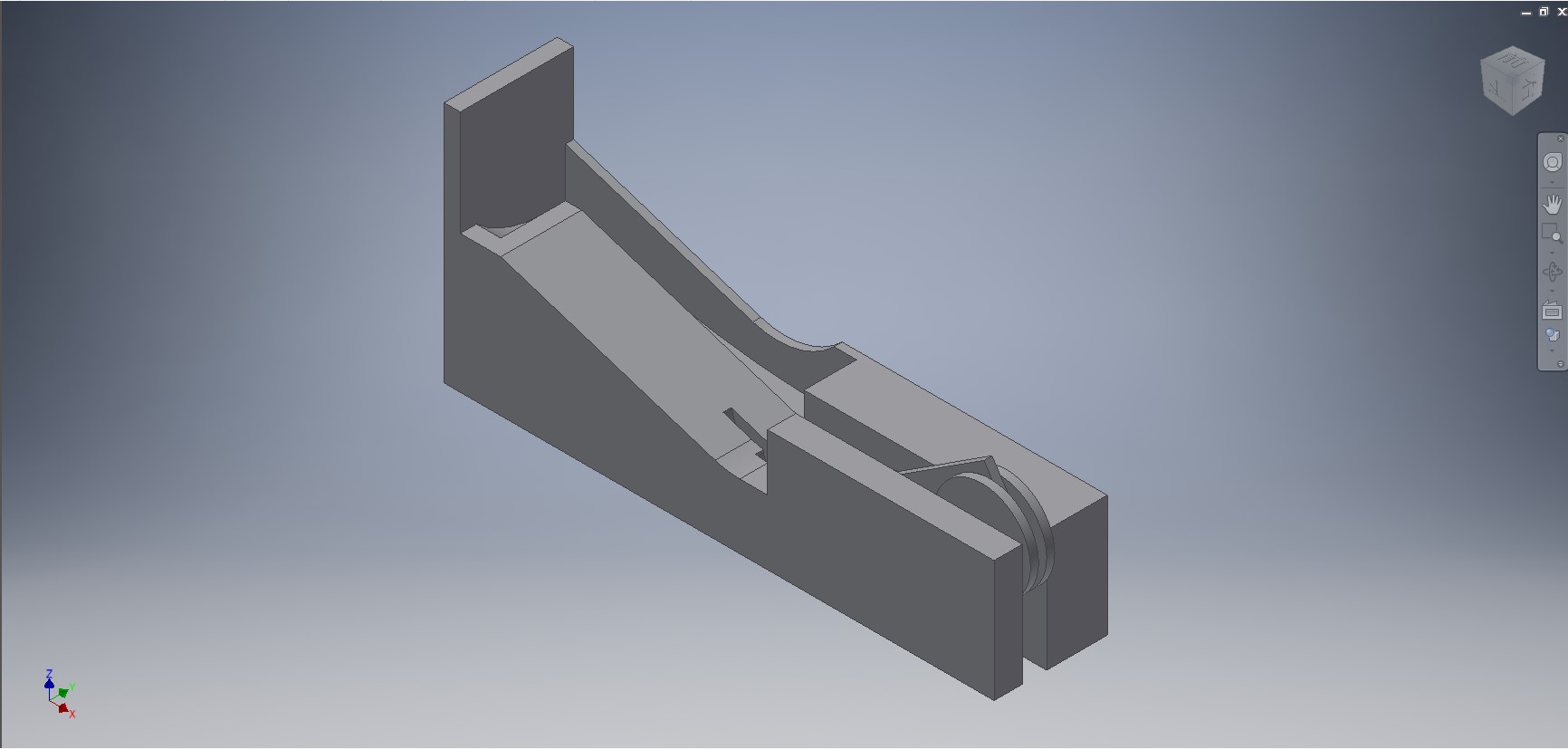
籃球機2.1
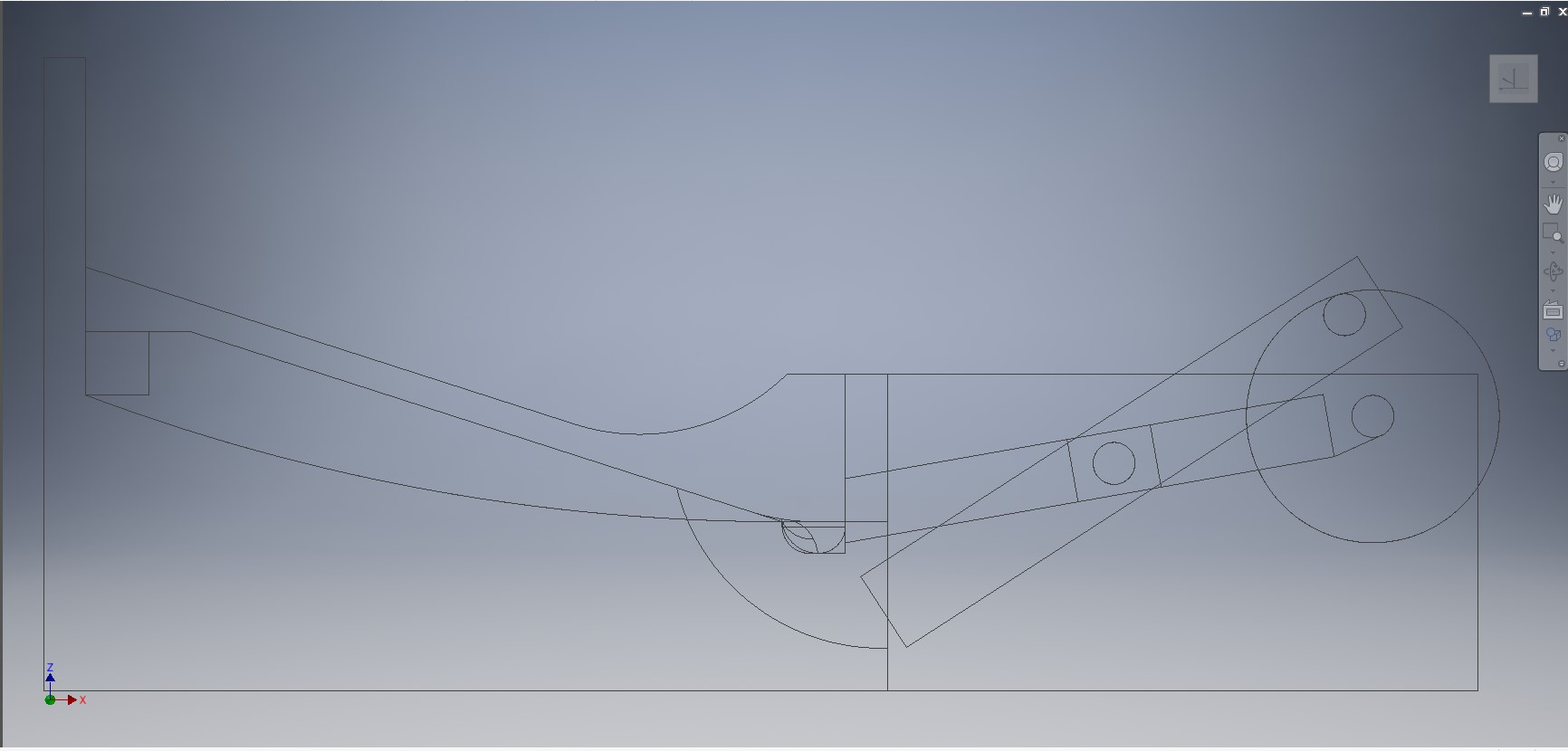
連桿機構的特點:
優點:運動副單位面積所受的壓力小且面接觸受力小,便於潤滑,磨損小;製造方便。
缺點:設計複雜誤差大。工作效率低。
原文網址:https://kknews.cc/news/3l5m3ey.html
主要問題:
1.過於簡陋
2.擊球桿會撞到基座
改善方法:
1.擊球桿的形狀
2.滑塊的距離縮短
Copyright © All rights reserved | This template is made with by Colorlib