w1 <<
Previous Next >> w2
leo
leo的開啟與編輯
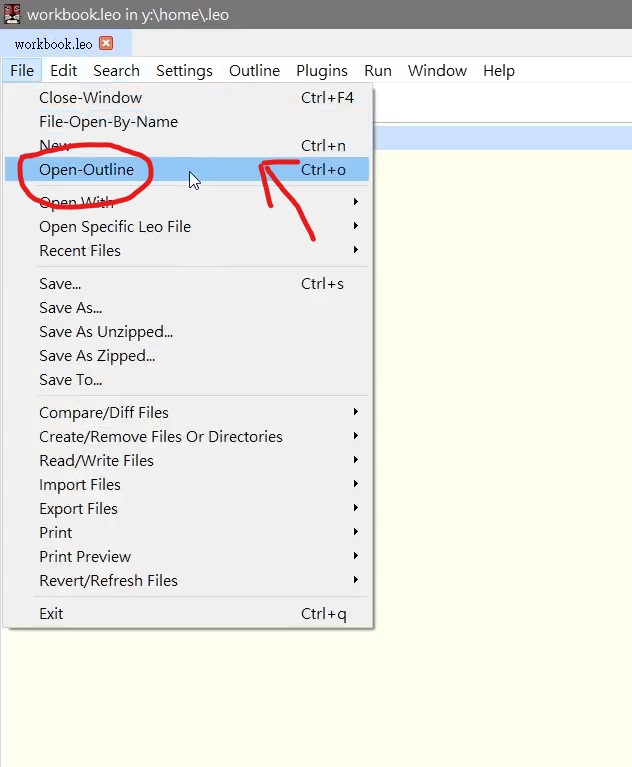
開啟檔案
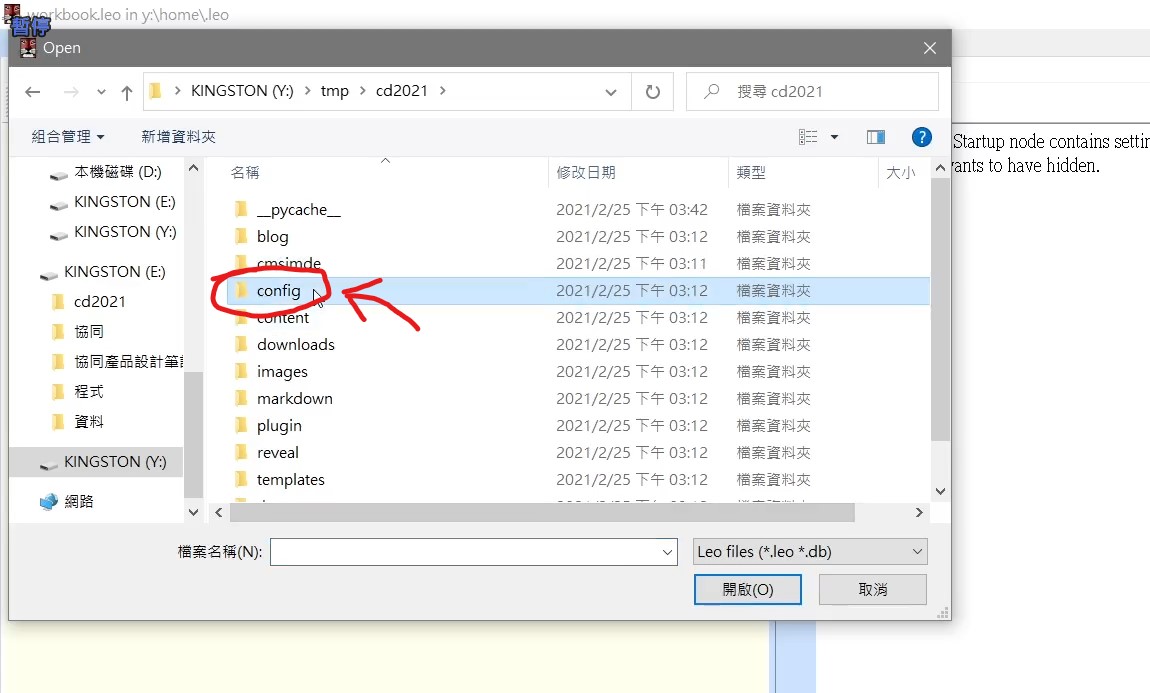
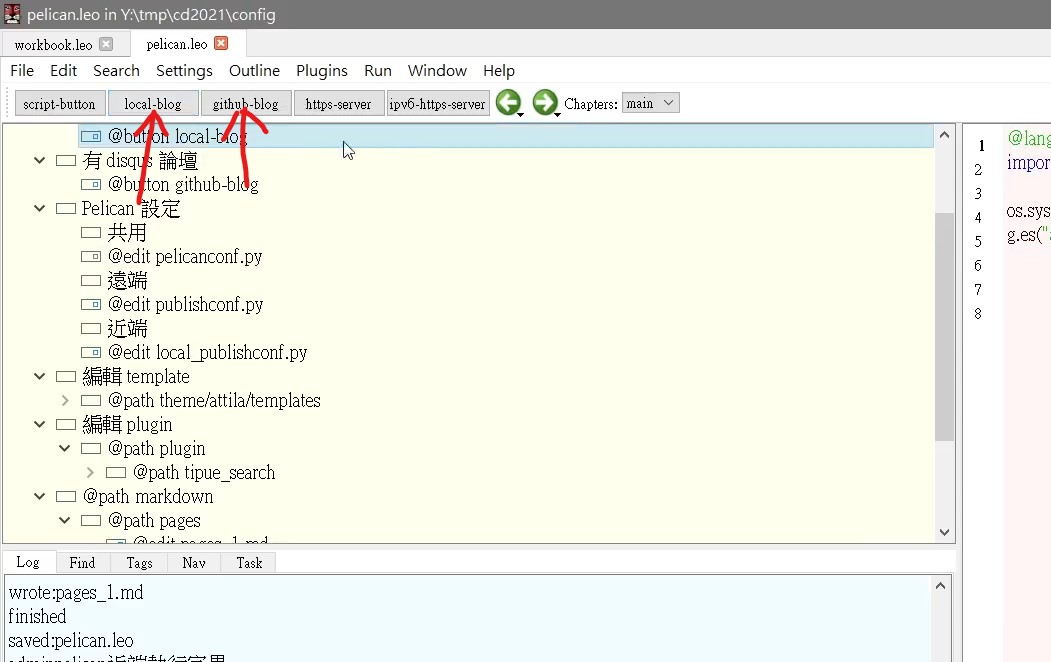
接下來到config的資料夾
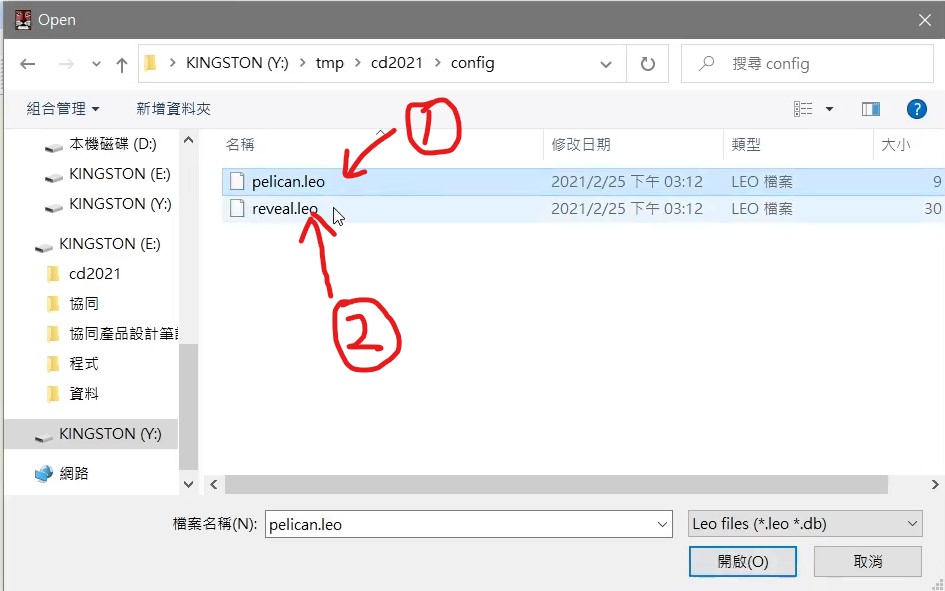
第一個是blog 第二個是簡報
打開blog的檔案
先改為"協同產品設計"
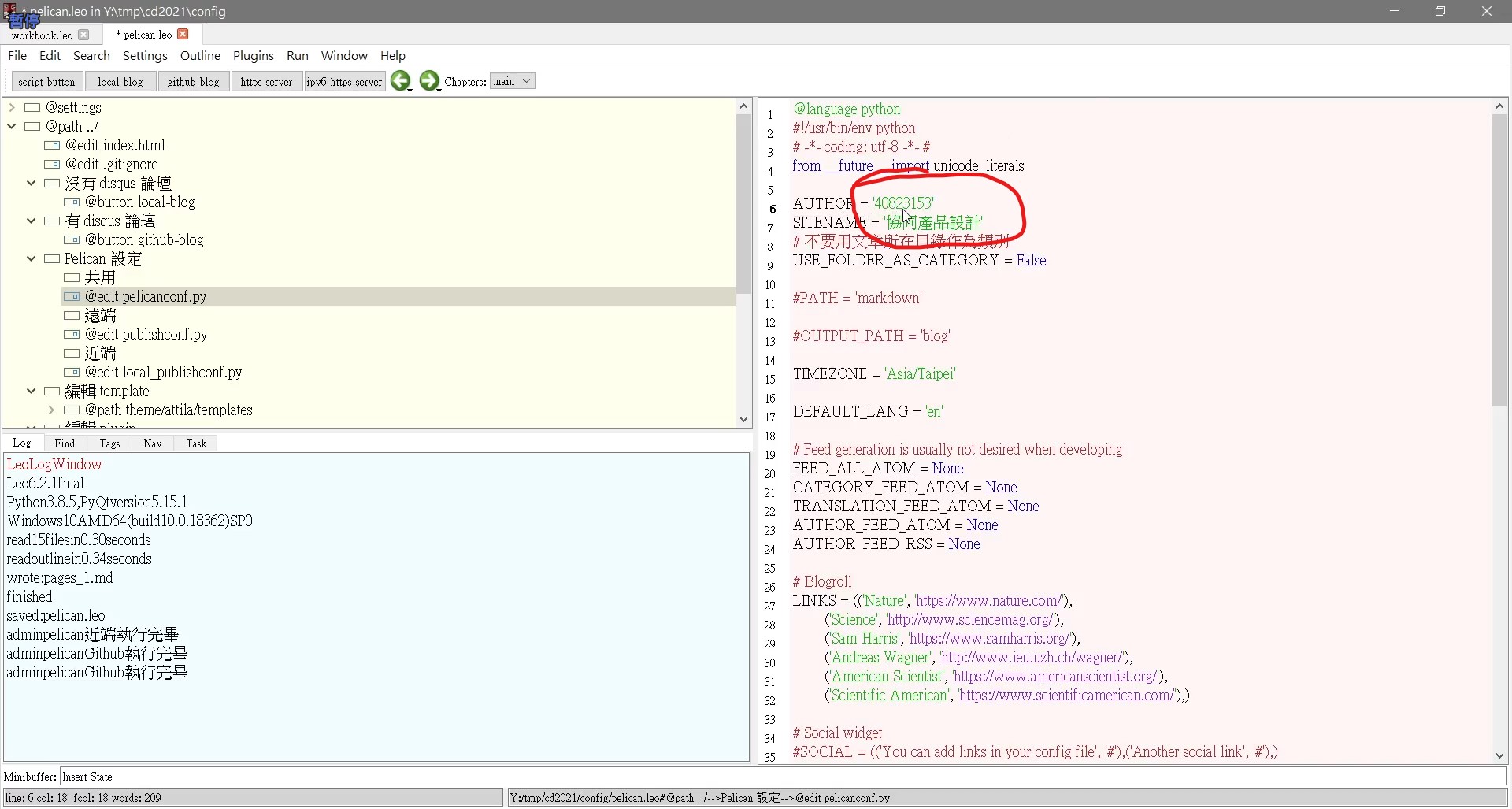
還有改成自己的學號
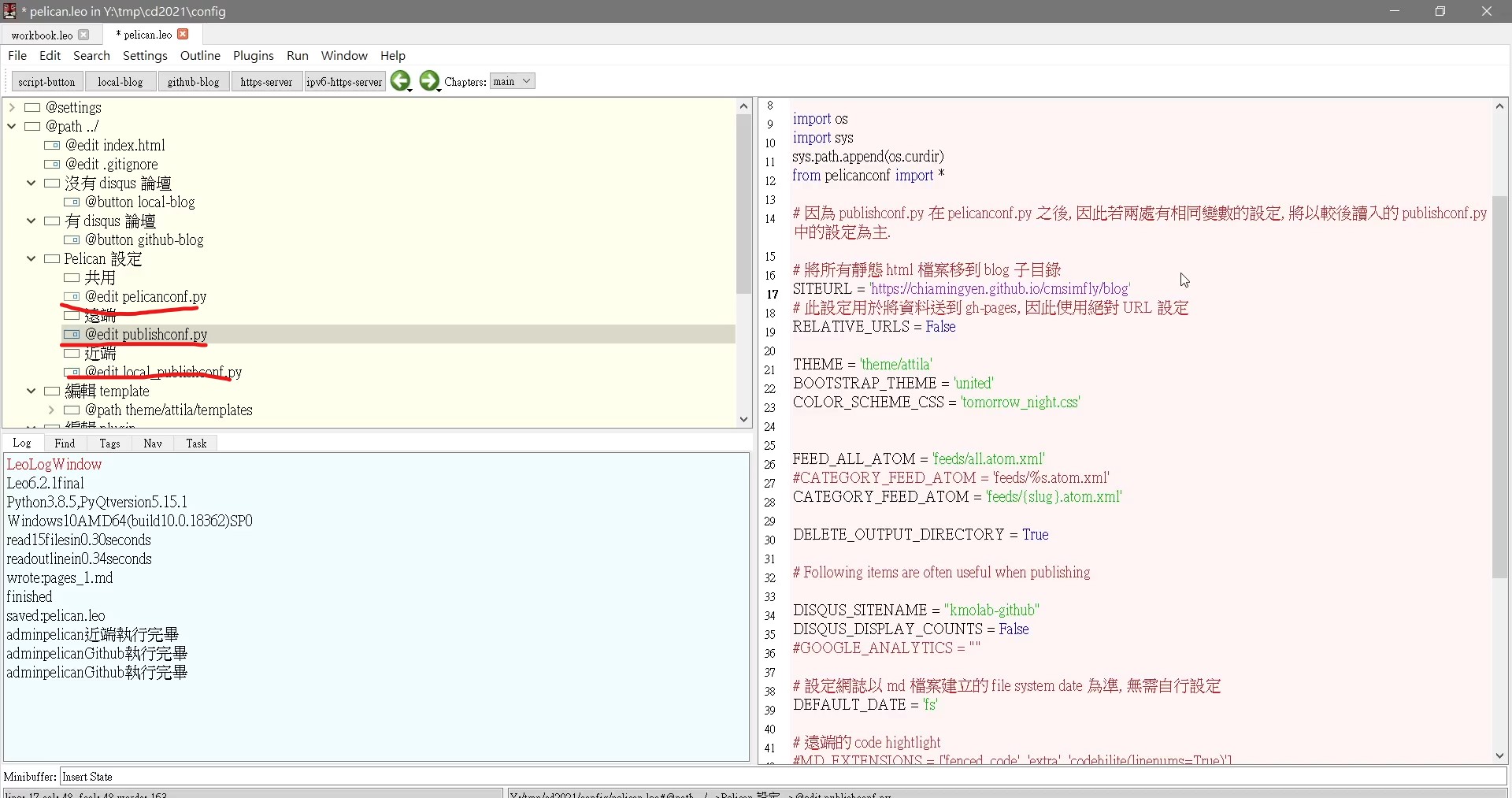
到共用、遠端和近端更改網址
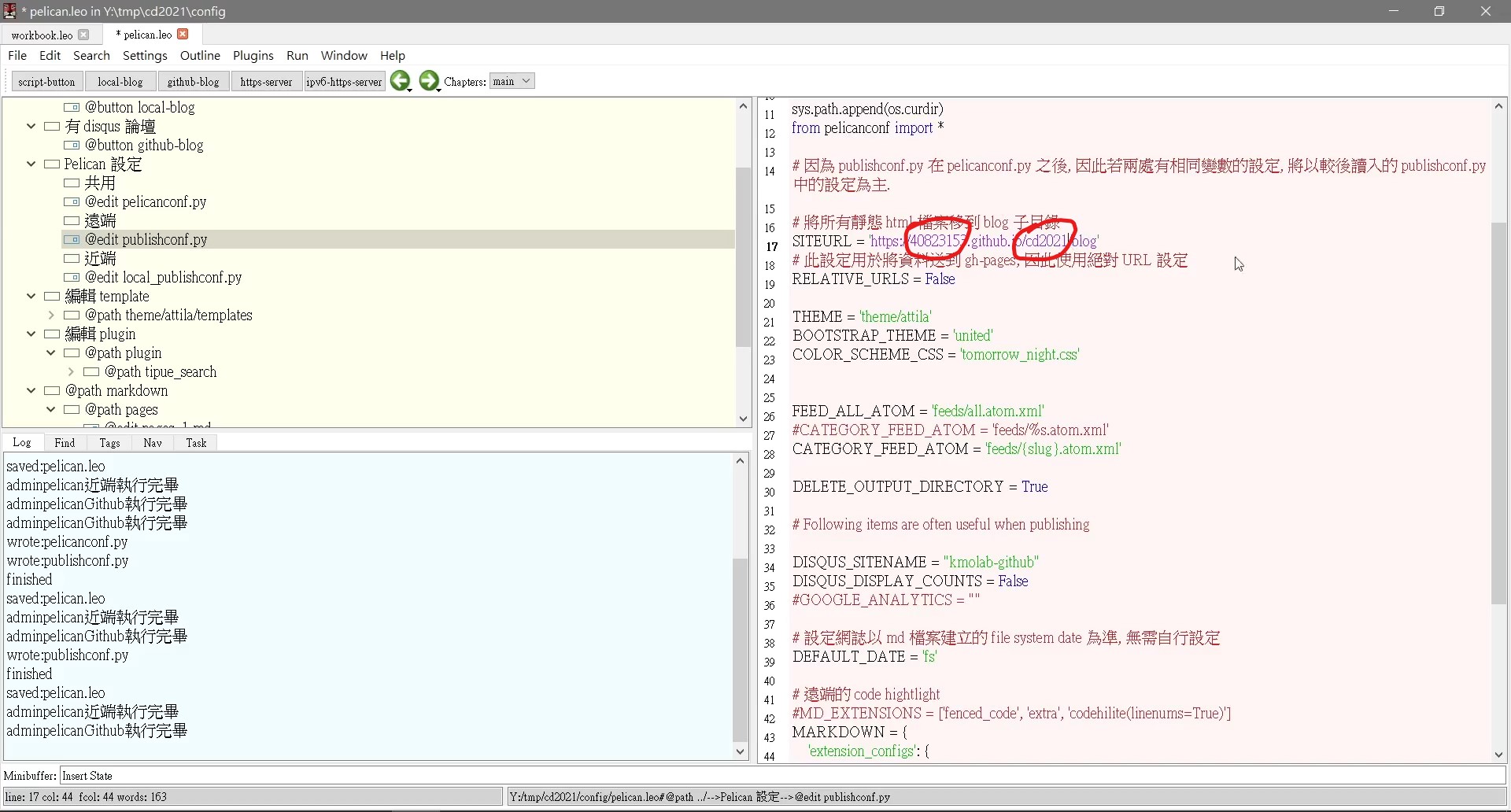
記得檢查近端遠端和中端的網址要改成學號以及加上cd2021不然會打不開blog
左為近端 右為遠端 兩個都要goto script
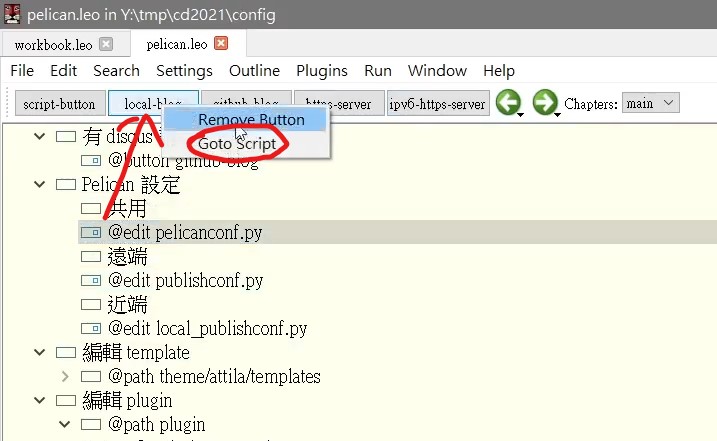
goto script
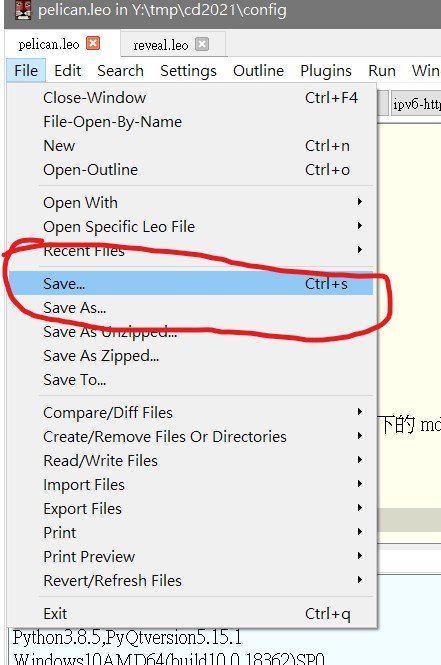
存檔完就可以打開bolg
做完blog還要git push 不然blog不會更新
w1 <<
Previous Next >> w2