籃球機2.4
2.4.1
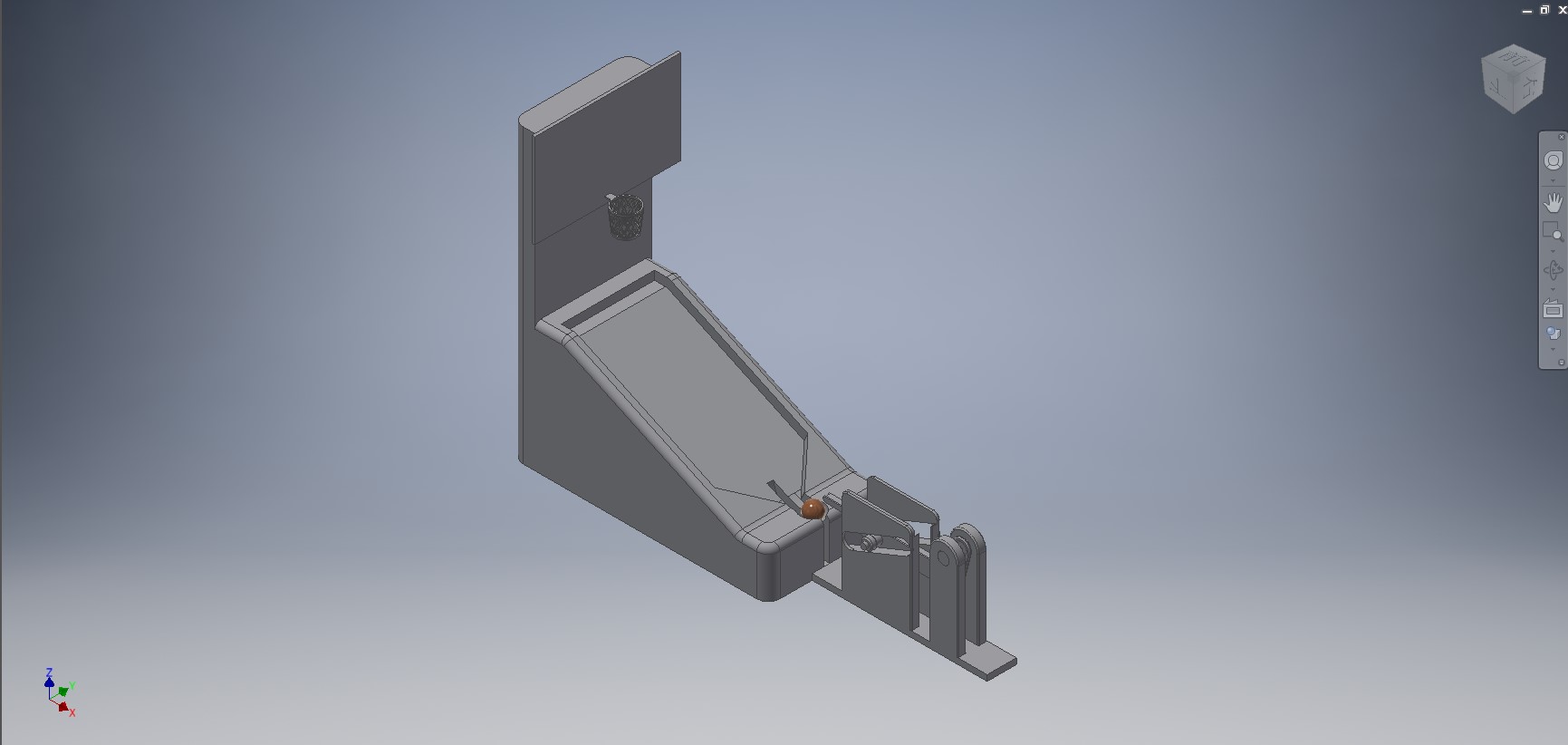
設計緣由:
1.為了確定可以完整的接到球,所以將斜坡面積挖深並改為單斜面
2.為了滑動流暢將滑塊改為圓形
3.想將擊球點角度提高,所以將擊球桿的擊球面設計為平面
2.4.2
設計緣由:為了讓球順利擊飛,所以將擊球桿的擊球面改為曲型
Copyright © All rights reserved | This template is made with by Colorlib